
 Podemos definir la distancia de un punto P a un plano α como la menor de las distancias desde el punto P a los infinitos puntos del plano α. Para determinar esta distancia deberemos obtener la recta perpendicular al plano α desde el punto P y obtener su punto I de intersección. La distancia d de P a I será la mínima distancia desde este punto al plano α.
Podemos definir la distancia de un punto P a un plano α como la menor de las distancias desde el punto P a los infinitos puntos del plano α. Para determinar esta distancia deberemos obtener la recta perpendicular al plano α desde el punto P y obtener su punto I de intersección. La distancia d de P a I será la mínima distancia desde este punto al plano α.
Para resolver este problema podemos descomponer en problemas elementales cada uno de los pasos necesarios:
- Determinación de las rectas notables (horizontales y frontales) del plano.
- Determinación de la dirección normal al plano α
- Obtención del punto I de intersección de la recta perpendicular que pasa por P con el plano α
- Determinación de la verdadera magnitud del segmento P-I que será la distancia buscada.
Determinación de las rectas notables
Para simplificar los trazados y obtener una imagen más clara del proceso, supondremos que el plano queda definido mediante dos de sus rectas notables: Una horizontal “h” y una frontal “f” paralelas a los planos de proyección Horizontal y Vertical respectivamente. El lector puede ver cómo determinar estas rectas a partir de otra definición del plano en “Sistema Diédrico: Rectas de un plano paralelas a los de proyección”

El enunciado del problema con estos datos será:
Determinar la mínima distancia desde el punto P a un plano α definido mediante una horizontal y una frontal que pasan por el punto A.
Determinación de la recta perpendicular al plano
Tal y como vimos al estudiar la “Recta perpendicular a un plano“, las direcciones de las proyecciones de la normal a un plano son perpendiculares en cada proyección, a las rectas del plano paralelas a dicha proyección. En nuestro caso serán perpendiculares a las horizontales en la proyección horizontal y a las frontales en la vertical. Usaremos la que pasa por “P” y tiene las direcciones mencionadas.

Obtención del punto de intersección
El método general de obtención de intersecciones entre rectas y planos que hemos estudiado en el capítulo de “Incidencia” se basa en usar un plano auxiliar que contenga a la recta. Este plano tendrá una recta de intersección “i” con el plano con el que queremos obtener la intersección de la recta. El punto “I” buscado se encontrará en la intersección “i” de los dos planos

El plano auxiliar elegido puede coincidir con el plano proyectante de la normal en cualquiera de las vistas. Hemos elegido la proyección vertical para determinar este plano auxiliar, ω, que produce una recta i de intersección con el plano formado con la horizontal y la frontal.
La recta de intersección “i” cortará a la frontal y a la horizontal en dos puntos (1 y 2).

La proyección que nos falta es inmediata de obtener al referir los puntos de intersección con las rectas notables en la proyección vertical a la proyección horizontal. La recta “i” determinará el punto de corte “I” entre la recta y el plano.

Determinación de la verdadera magnitud de la mínima distancia
La forma de obtener la verdadera magnitud de un segmento la vimos en “Sistema Diédrico: Verdadera magnitud de la recta“. Necesitaremos construir un triángulo rectángulo cuyos catetos serán la proyección del segmento sobre un plano de proyección y la cota relativa de sus extremos medida en dirección perpendicular a este plano de proyección. La hipotenusa del triángulo nos determinará la verdadera magnitud del segmento.
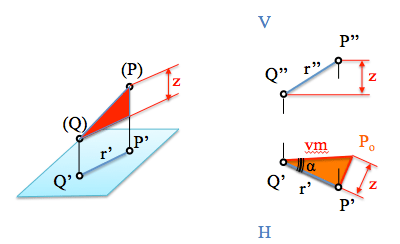
En el caso de estudio que estamos desarrollando podemos determinar la cota relativa entre el punto “P” y el “I”. Para ello obtendremos la cota relativa, z, de estos puntos respecto del plano horizontal. Esta magnitud la obtendremos en la proyección vertical según la dirección de las líneas de referencia entre las proyecciones vertical y horizontal.

Obtendremos la verdadera magnitud mediante la construcción del triángulo rectángulo, obteniendo en consecuencia la distancia “d” del punto P al plano α.



Debe estar conectado para enviar un comentario.