
 די proyecciones principales de la recta sobre dos planos diédricos (האָריזאָנטאַל און ווערטיקאַל פּליינז) פֿאַר דיטערמאַנינג אנדערע נייַ פּליינז אָרטהאָגאָנאַל פּראַדזשעקשאַנז.
די proyecciones principales de la recta sobre dos planos diédricos (האָריזאָנטאַל און ווערטיקאַל פּליינז) פֿאַר דיטערמאַנינג אנדערע נייַ פּליינז אָרטהאָגאָנאַל פּראַדזשעקשאַנז.
מיר וועט זען ווי גענעריקאַללי באַשטימען אַ נייַ פּרויעקציע פון צוויי אנדערע. שפּעטער מיר וועלן באַטראַכטן דיין אַפּלאַקיישאַן צו לערנען די אַזוי גערופענע “אַגזיליערי פּראַדזשעקשאַנז”, סטרעסינג זייַן נוצן אין סאַלווינג פאַרשידענע פּראָבלעמס.
En particular se suele utilizar frecuentemente la denominada “tercera proyección” que se realiza sobre un plano ortogonal a los anteriores denominado plano de perfil. Los tres planos ( Horizontal, ה, Vertical, אין y Perfil, פּ) determinan un triedro trirrectángulo, en el que se tienen las tres coordenadas (X,און,פון) que permiten restituir la información espacial que tengamos representada (proyectada).
Al proyectar sobre un plano, la única coordenada que no se tiene proyectada en esta proyección es la perpendicular a dicho plano.
 Si proyectamos sobre el plano horizontal (XY) la coordenada Z la tendremos sobre la proyección vertical, pero también sobre la correspondiente al plano de perfil.
Si proyectamos sobre el plano horizontal (XY) la coordenada Z la tendremos sobre la proyección vertical, pero también sobre la correspondiente al plano de perfil.
Vemos que dos planos ortogonales comparten una misma coordenada que puede servir para obtener la nueva proyección.
Dadas dos proyecciones sobre planos ortogonales : ¿Cómo podemos obtener la tercera proyección?
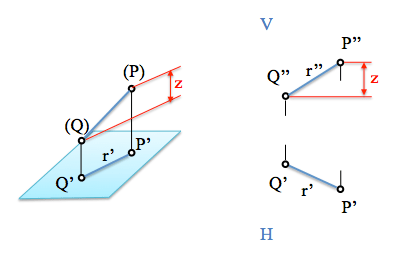
Para iniciar la representación que queremos obtener fijaremos un primer punto, P o Q, en la tercera proyección. El otro punto lo fijaremos mediante las cotas relativas que deben mantenerse.
Hemos visto que las proyecciones están vinculadas mediante líneas de referencia. Las nuevas proyecciones, פּ”’ און ק”’ de la recta, en tercera proyección, se encontrarán en las correspondientes líneas de referencia, por lo que mantendrán una misma “פון” o cota respecto del plano horizontal.

A su vez, el valor del “alejamiento”, coordenada “און“, respecto del plano vertical, אין, se mantiene en la tercera proyección, permitiendo por lo tanto la determinación de los puntos buscados.

סיסטעמאַס_דע_רעפּרעסענטאַסיאָן

Debe estar conectado para enviar un comentario.