
 Al relacionar proyectivamente mediante involuciones cuatro puntos de una cónica determinamos el eje de involución de estas proyectividades.
Al relacionar proyectivamente mediante involuciones cuatro puntos de una cónica determinamos el eje de involución de estas proyectividades.
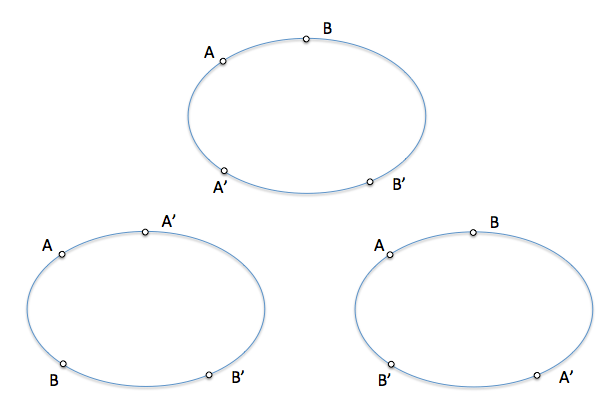
Dados los cuatro puntos necesarios para definir una involución, podemos plantearnos cuántas involuciones diferentes podemos establecer entre ellos.
Si llamamos “א” a uno de los puntos, el homólogo de este punto en una involución concreta puede ser cualquiera de los otros tres, siendo el par de puntos restante homólogos entre si. Vemos por lo tanto que son posibles tres involuciones diferentes como se aprecia en la figura.
אין cada una de estas involuciones se determinará un eje de involución diferente.
Si obtenemos los tres ejes de involución sobre una misma figura, podremos obtener conclusiones interesantes.
- Si asociamos como homólogos los puntos A-A12 tendremos como eje de involución a la recta e12
- Si asociamos como homólogos los puntos A-A23 tendremos como eje a la recta e23
- Si asociamos como homólogos los puntos A-A31 tendremos como eje a la recta e31
Vemos que los tres ejes de involución coinciden con las diagonales del cuadrivértice completo determinado por los puntos homólogos de la cónica, por lo que la polar de cada punto diagonal respecto de dos de los lados del cuadrivértice es la diagonal opuesta (que no lo contiene), tal y como vimos al definir la polar de un punto respecto de dos rectas.
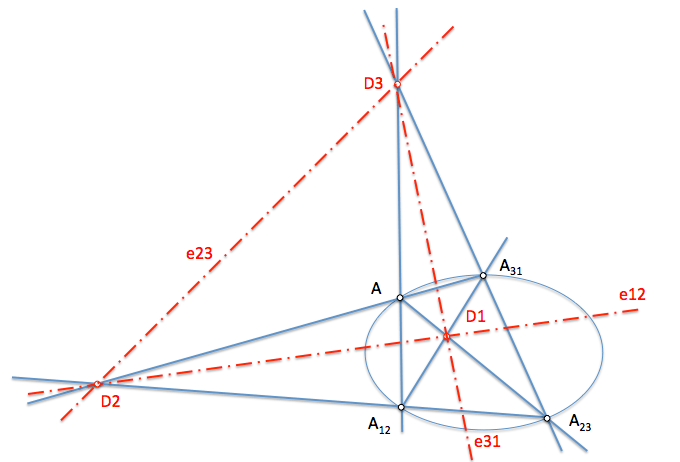
Vemos que en el triángulo determinado por los tres puntos diagonales, ד 1, D2 y D3, cada uno de estos puntos tiene por polar a la recta opuesta. Decimos que este triángulo es “Autopolar” respecto de la cónica dada.


Debe estar conectado para enviar un comentario.