
 Vimos o presente Sistemas de Representação geometria descritiva, que é o conjunto de técnicas que podem representar geométrica caráter espaço tridimensional em uma superfície bidimensional.
Vimos o presente Sistemas de Representação geometria descritiva, que é o conjunto de técnicas que podem representar geométrica caráter espaço tridimensional em uma superfície bidimensional.
Em particular, explorar em pormenor o chamado “Sistema de diedro” (ver sistemas de classificação de representação) com base no perspectivas de relações aparecendo na projecção cilíndrica em dois planos de projecção ortogonal.
Projeção ortogonal
Para entender em profundidade o modelo baseado em espaço de projeção cilíndrica ortogonal vamos rever alguns teoremas de análise anteriormente facilitou nós.
Uma linha é perpendicular a um plano que seja duas linhas não paralelas contidas no plano.

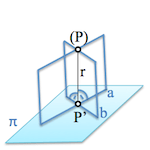
A projeção de um ponto (P) espacial num plano de projecção em particular é obtida pela determinação da linha “r” que contém o ponto e é perpendicular ao plano, assim, quaisquer duas linhas perpendiculares “a” e “b” que não são paralelas ao referido plano.
A projeção P’ é a intersecção da reta r com plano.
Outra teorema espacial será útil é o seguinte:
Se uma linha perpendicular a um plano, todos os planos que contêm também são ortogonal a este plano.
 Se a linha r perpendicular ao plano, planos determinados pelas linhas através P’ (a, b, etc) são planos ortogonais ao primeiro.
Se a linha r perpendicular ao plano, planos determinados pelas linhas através P’ (a, b, etc) são planos ortogonais ao primeiro.
Nós pensamos que a linha reta r é a dobradiça de uma porta e os planos infinitos ocupando posições para girar sobre seu eixo.
Finalmente, precisamos estabelecer uma relação entre três planos ortogonais entre si:
Se o plano é perpendicular a dois outros planos, é a interseção desses reta.
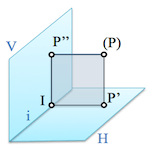 A linha de intersecção dos dois planos, Eu, direção é comum a ambos os planos. Os três planos se cruzam em um ponto Eu.
A linha de intersecção dos dois planos, Eu, direção é comum a ambos os planos. Os três planos se cruzam em um ponto Eu.
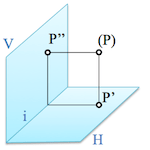
Se projetarmos ortogonalmente o ponto (P) em aviões H e V, a reta (P)-P’ e (P)-P” são ortogonais entre eles, respectivamente.
O plano que contém um (P)-P’ é ortogonal ao plano H e similarmente, o plano que contém a linha reta (P)-P” será V. Portanto, considerando o plano formado pelos pontos (P)–P’–P” e ponto Eu, Isto irá ser perpendicular V e H e, portanto, sua direção comum, em linha reta Eu.
A última propriedade que nos permite estabelecer a relação que existe entre as duas projeções perspectivas relacionadas.
Sistema de diedro
Se dobrada para baixo do plano horizontal da projecção no plano vertical ( ou vice-versa), vemos as duas saliências sobre o mesmo plano.
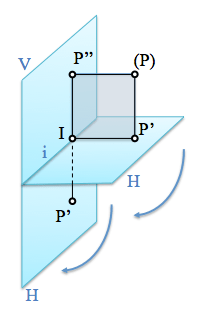
Através da rotação do plano horizontal H na vertical V obter duas projeções ortogonais no mesmo plano que irá coincidir com o desenho.
Este modelo é conhecido a partir de representação “Sistema de diedro” Como teremos as projeções sobre dois planos ortogonais, pelo menos, para determinar inequivocamente a posição no espaço dos pontos representados.
O processo de “restituição” Espaço deve ser permitido para saber como eles estão localizados em elementos geométricos de espaço representados neste sistema.
Podemos ver que ao dobrar o plano horizontal sobre o eixo vertical, projeções P’ e P” são alinhados numa linha perpendicular à intersecção Eu ambos os planos. Esta linha é chamada “Linha de Base” entre as projeções dos pontos. A reta Eu é conhecido pelo nome de “Linha de terra“
As linhas de referência são duas projeções ortogonais à linha de terra correspondente.
Vamos ver o que podemos fazer sem a linha de terra quando desenvolvemos o sistema. Por enquanto nos ajuda a compreender a essência do.

Podemos rotular de forma diferente para as projeções nos planos. Algumas biografias usar subscritos, outros acentos ou algarismos romanos.
Normalmente, a projecção no plano horizontal conhecido como “primeiro” projeção, no plano vertical vontade “segundo” e um terceiro plano ortogonal ao referido, chamado plano de perfil, nós “terceiro” projeção.
Próxima lição … Projeção da linha

Sistemas_de_representacion

Deve estar conectado postar um comentário.