
 Hemos visto al presentar los Sistemas de Representación que la geometría descriptiva es el conjunto de técnicas de carácter geométrico que permite representar el espacio tridimensional sobre una superficie bidimensional.
Hemos visto al presentar los Sistemas de Representación que la geometría descriptiva es el conjunto de técnicas de carácter geométrico que permite representar el espacio tridimensional sobre una superficie bidimensional.
En particular veremos con detalle el denominado “Sistema diédrico” (ver la clasificación de los sistemas de representación) que se basa en las relaciones perspectivas que aparecen en la proyección cilíndrica ortogonal sobre dos planos de proyección.
Proyección ortogonal
Para entender en profundidad el modelo basado en la proyección cilíndrica ortogonal repasaremos previamente algunos teoremas espaciales que nos facilitaran el análisis.
Una recta es perpendicular a un plano si lo es a dos rectas no paralelas contenidas en dicho plano.

La proyección de un punto (P) del espacio sobre un determinado plano de proyección se obtiene determinando la recta “r” que contiene al punto y es perpendicular a dicho plano, por lo tanto perpendicular a dos rectas cualesquiera “a” y “b” que no sean paralelas de dicho plano.
La proyección P’ será la intersección de la recta r con el plano.
Otro teorema espacial que será de gran utilidad es el siguiente:
Si una recta es perpendicular a un plano, todos los planos que la contengan también son ortogonales a dicho plano.
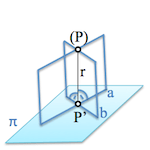 Si la recta r es perpendicular al plano, los planos que determina con las rectas que pasan por P’ (a, b, etc) son planos ortogonales al primero.
Si la recta r es perpendicular al plano, los planos que determina con las rectas que pasan por P’ (a, b, etc) son planos ortogonales al primero.
Podemos pensar que la recta r es la línea de bisagras de una puerta y los planos las infinitas posiciones que ocupa al girar sobre su eje.
Por último necesitaremos establecer una relación entre tres planos ortogonales entre si:
Si un plano es perpendicular a otros dos planos, lo es a la recta intersección de estos.
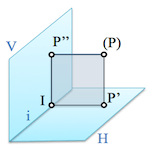 La recta intersección de los dos planos, i, es la dirección común a ambos planos. Los tres planos se cortarán en un punto I.
La recta intersección de los dos planos, i, es la dirección común a ambos planos. Los tres planos se cortarán en un punto I.
Si proyectamos ortogonalmente el punto (P) sobre los planos H y V, las rectas (P)-P’ y (P)-P” serán ortogonales a ellos respectivamente.
El plano que contenga a (P)-P’ será ortogonal al plano H y de forma análoga, el plano que contenga a la recta (P)-P” lo será a V. Por lo tanto, si consideramos el plano formado por los puntos (P)–P’–P” y el punto I, este será perpendicular a V y H y por lo tanto a su dirección común, recta i.
Esta última propiedad nos permitirá establecer la relación perspectiva que existe entre dos proyecciones vinculadas.
Sistema diédrico
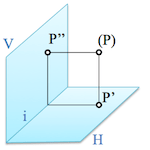
Si abatimos el plano horizontal de proyección sobre el plano vertical ( o al revés), podremos ver las dos proyecciones sobre un mismo plano.
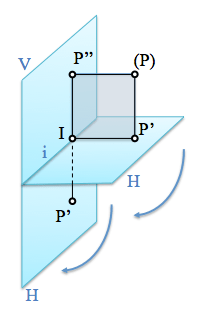
Al abatir el plano horizontal H sobre el vertical V obtendremos dos proyecciones ortogonales sobre un mismo plano que haremos coincidir con el del dibujo.
Este modelo de representación se conoce con el nombre de “Sistema diédrico” ya que necesitaremos las proyecciones sobre dos planos ortogonales, al menos, para determinar inequívocamente las posiciones en el espacio de los puntos representados.
El proceso de “restitución” espacial debe permitir saber cómo se encuentran localizados en el espacio los elementos geométricos representados en este sistema.
Podemos observar que al abatir el plano horizontal sobre el vertical, las proyecciones P’ y P” quedan alineadas en una recta que es perpendicular a la intersección i de ambos planos. Esta línea se denomina “Línea de referencia” entre las proyecciones de los puntos. A la recta i se la conoce con el nombre de “Línea de tierra“
Las líneas de referencia entre dos proyecciones son ortogonales a la correspondiente línea de tierra.
Veremos que podemos prescindir de la línea de tierra cuando desarrollemos el sistema. De momento nos sirve para entender la esencia del mismo.

Podemos etiquetar de diferente forma a las proyecciones sobre los planos. Algunas biografías utilizan subíndices, otras tildes o números romanos.
Normalmente la proyección sobre el plano horizontal se conocerá como “la primera” proyección, sobre el vertical será “la segunda” y sobre un tercer plano ortogonal a los anteriores, denominado plano de perfil, tendremos “la tercera” proyección.
Siguiente lección … Proyección de la recta

Sistemas_de_representacion

Debe estar conectado para enviar un comentario.